モータドライバ
新生工業製超音波モータ用のドライバ(駆動回路)です。
コストを抑えたシンプルモデル、速度制御が可能なモデル、モータの起動特性を向上させる機能を備えたモデルを提供しています。
USR30シリーズ専用 ドライバ:D6030 / 24V

D6030/24V
-
D6030はUSR30シリーズ専用のモータドライバです。
低コストでUSR30を利用したシステムを構築することができます。
TTLレベルの信号切り替えによりモータのCW・CCW・停止を制御し、DC 0[V] 〜 3.2[V]のアナログ電圧によりモータの回転数を変化させることが可能です。カタログ・取扱説明書はこちら
製品図面・CADデータはこちら
※ 仕様の詳細についてはお問い合わせください。
仕様
| 電源電圧 | DC24 [V] ±0.5 [V] |
| 発振波形 | 疑似正弦波 |
| 発振周波数 | 49 [KHz]〜55 [KHz] |
| 速度変速方式 | 周波数変化 |
| 周波数制御 | 振動振幅帰還による自動追尾方式 |
| モータドライブ電圧 | 110 [Vrms] |
| 消費電流 | DC24V : 0.8 [A] / DC12V : 1.5[A] |
| 過電流保護 | 24V : 0.8 [A](φ5.2 ミゼット型ヒューズ) 12V : 1.5[A](φ5.2 ミゼット型ヒューズ) |
| 絶縁抵抗 | 10 [MΩ]以上 (モータ未接続、筐体と各端子間接続) |
| 絶縁耐圧 | 1 [KVAC] (モータ未接続、筐体と各端子間接続) |
| 保存温度範囲 | -20 [℃] 〜 +80 [℃] |
| 使用温度範囲 | -10 [℃] 〜 +55 [℃] |
| 起動・停止操作 | TTLレベル信号切り替え(スイッチ利用時は別途準備) |
| 起動応答性 | 50 [ms]以下 (モータ慣性負荷なし) |
| 停止応答性 | 1 [ms]以下 (モータ慣性負荷なし) |
| 無負荷可変速範囲 | 30 [rpm] 〜 300 [rpm] |
| 速度調整外部電圧 | DC 0 [V] 〜 3.2 [V] |
| 推奨起動・停止スイッチ | 中央付単極双投スイッチ(ON-OFF-ON) |
| 推奨速度設定ボリューム | 10 [KΩ]、0.1 [W]、Bタイプ (要別途準備) |
| 重量 | 105 [g] |
| 外形サイズ | 縦×横×高さ:22 [mm]×70 [mm]×56 [mm] |
| 備考 | ※12V仕様はご相談によりお受け致します。 |
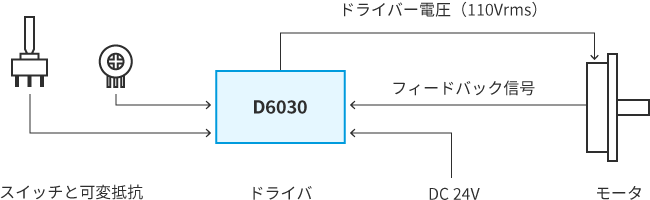
D6030に外部スイッチを接続し、CW・CCW方向の回転・停止を操作できます。
また可変抵抗を接続することで速度を変化させることができます。
D6030はモータからのフィードバック信号を利用し、モータを回転させます。
※モータの回転による発熱に伴い、モータの回転数が遅くなることがあります。
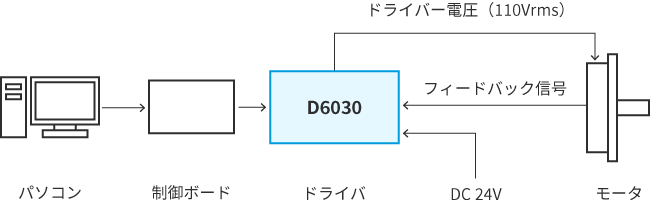
制御ボードからD6030へはTTL信号レベルのCW・CCW方向の回転・停止信号、速度変化のためのDC 0[V] 〜 3.2[V] のアナログ信号を入力します。
D6030はモータからのフィードバック信号を利用し、モータを回転させます。
※モータの回転による発熱に伴い、モータの回転数が遅くなることがあります。
制御ボードからD6030へはTTL信号レベルのCW・CCW方向の回転・停止信号、速度変化のためのDC 0[V] 〜 3.2[V] のアナログ信号を入力します。
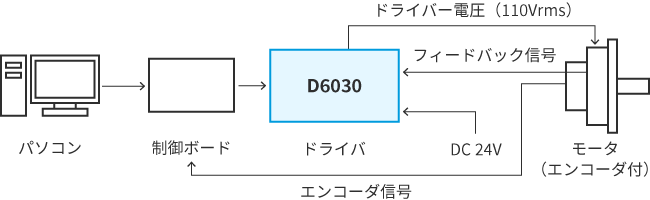
モータのエンコーダ信号を外部の制御ボードで利用し、モータの速度制御・位置制御が可能です。
USR60シリーズ専用 ドライバ:D6060 / 24V

D6060/24V
-
D6060はUSR60シリーズ専用のモータドライバです。
低コストでUSR60を利用したシステムを構築することができます。
TTLレベルの信号切り替えによりモータのCW・CCW・停止を制御し、DC 0[V] 〜 3.2[V]のアナログ電圧によりモータの回転数を変化させることが可能です。カタログ・取扱説明書はこちら
製品図面・CADデータはこちら
※ 仕様の詳細についてはお問い合わせください。
仕様
| 電源電圧 | DC24 [V] ±0.5 [V] |
| 発振波形 | 疑似正弦波 |
| 発振周波数 | 40 [KHz]〜45 [KHz] |
| 速度変速方式 | 周波数変化 |
| 周波数制御 | 振動振幅帰還による自動追尾方式 |
| モータドライブ電圧 | 130 [Vrms] |
| 消費電流 | DC24V : 2.0 [A] / DC12V : 4.0[A] |
| 過電流保護 | 24V : 2.5 [A] (φ5.2 ミゼット型ヒューズ) 12V : 4[A](φ5.2 ミゼット型ヒューズ) |
| 絶縁抵抗 | 10 [MΩ]以上 (モータ未接続、筐体と各端子間接続) |
| 絶縁耐圧 | 1 [KVAC] (モータ未接続、筐体と各端子間接続) |
| 保存温度範囲 | -20 [℃] 〜 +80 [℃] |
| 使用温度範囲 | -10 [℃] 〜 +55 [℃] |
| 起動・停止操作 | TTLレベル信号切り替え (スイッチ利用時は別途準備) |
| 起動応答性 | 50 [ms]以下 (モータ慣性負荷なし) |
| 停止応答性 | 1 [ms]以下 (モータ慣性負荷なし) |
| 無負荷可変速範囲 | 20 [rpm] 〜 150 [rpm] |
| 速度調整外部電圧 | DC 0 [V] 〜 3.2 [V] |
| 推奨起動・停止スイッチ | 中央付単極双投スイッチ(ON-OFF-ON) |
| 推奨速度設定ボリューム | 10 [KΩ]、0.1 [W]、Bタイプ (要別途準備) |
| 重量 | 250 [g] |
| 外形サイズ | 縦×横×高さ:35 [mm]×100 [mm]×83 [mm] |
| 備考 | ※12V仕様はご相談によりお受け致します。 |
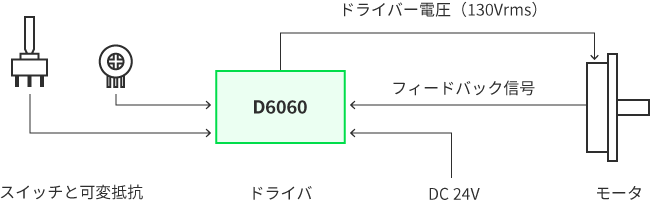
D6060に外部スイッチを接続し、CW・CCW方向の回転・停止を操作できます。
また可変抵抗を接続することで速度を変化させることができます。
D6060はモータからのフィードバック信号を利用し、モータを回転させます。
※モータの回転による発熱に伴い、モータの回転数が遅くなることがあります。
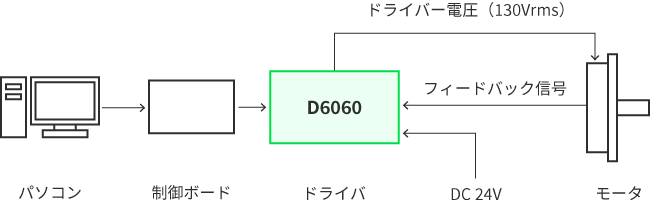
制御ボードからD6060へはTTL信号レベルのCW・CCW方向の回転・停止信号、速度変化のためのDC 0[V] 〜 3.2[V] のアナログ信号を入力します。
D6060はモータからのフィードバック信号を利用し、モータを回転させます。
※モータの回転による発熱に伴い、モータの回転数が遅くなることがあります。
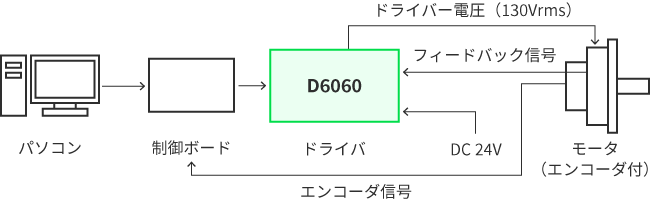
制御ボードからD6060へはTTL信号レベルのCW・CCW方向の回転・停止信号、速度変化のためのDC 0[V] 〜 3.2[V] のアナログ信号を入力します。
モータのエンコーダ信号を外部の制御ボードで利用し、モータの速度制御・位置制御が可能です。
USR30シリーズ・USR60シリーズ 用ドライバ:D6060E / 24V

D6060E/24V
-
D6060EはUSR30・USR60シリーズ両対応のモータドライバです。
エンコーダ信号を利用した速度制御機能を備えているため、安定した速度でモータを回転させることができます。
TTLレベルの信号切り替えによりモータのCW・CCW・停止を制御し、DC 0[V] 〜 3.2[V]のアナログ電圧によりモータの回転数を変化させることが可能です。カタログ・取扱説明書はこちら
製品図面・CADデータはこちら
※ 仕様の詳細についてはお問い合わせください。
仕様
| 電源電圧 | DC24 [V] ±0.5 [V] |
| 発振波形 | 疑似正弦波 |
| 発振周波数 | 40 [KHz]〜45 [KHz] |
| 速度変速方式 | 周波数変化 |
| 周波数制御 | エンコーダ信号帰還による自動追尾方式 |
| モータドライブ電圧 | 130 [Vrms] |
| 消費電流 | DC24V : 2.0 [A] / DC12V : 4.0[A] |
| 過電流保護 | 24V : 2.5 [A] (φ5.2 ミゼット型ヒューズ) 12V : 4[A](φ5.2 ミゼット型ヒューズ) |
| 絶縁抵抗 | 10 [MΩ]以上 (モータ未接続、筐体と各端子間接続) |
| 絶縁耐圧 | 1 [KVAC] (モータ未接続、筐体と各端子間接続) |
| 保存温度範囲 | -20 [℃] 〜 +80 [℃] |
| 使用温度範囲 | -10 [℃] 〜 +55 [℃] |
| 起動・停止操作 | TTLレベル信号切り替え (スイッチ利用時は別途準備) |
| 起動応答性 | 50 [ms]以下 (モータ慣性負荷なし) |
| 停止応答性 | 1 [ms]以下 (モータ慣性負荷なし) |
| 無負荷可変速範囲 | 15 [rpm] 〜 150 [rpm] |
| 速度調整外部電圧 | DC 0 [V] 〜 3.2 [V] |
| 推奨起動・停止スイッチ | 中央付単極双投スイッチ(ON-OFF-ON) |
| 推奨速度設定ボリューム | 10 [KΩ]、0.1 [W]、Bタイプ (要別途準備) |
| 重量 | 260 [g] |
| 外形サイズ | 縦×横×高さ:35 [mm]×100 [mm]×83 [mm] |
| 備考 | エンコーダ信号を利用した速度制御機能を装備 ※12V仕様はご相談によりお受け致します。 |
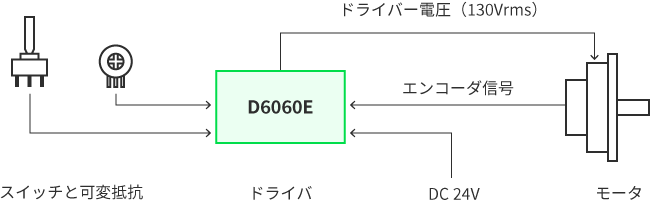
D6060Eに外部スイッチを接続し、CW・CCW方向の回転・停止を操作できます。
また可変抵抗を接続することで速度を変化させることができます。
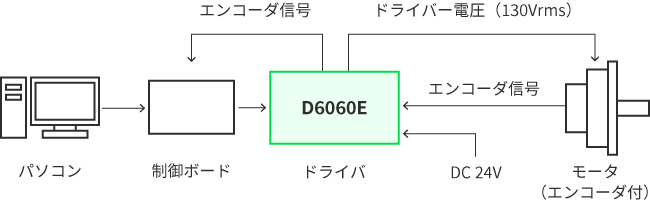
D6060Eはモータからのエンコーダ信号を利用し、モータを回転させます。
制御ボードからD6060EへはTTL信号レベルのCW・CCW方向の回転・停止信号、速度変化のためのDC 0[V] 〜 3.2[V] のアナログ信号を入力します。
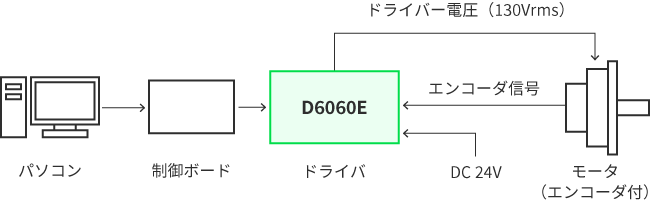
D6060Eはモータからのエンコーダ信号を利用し、モータを回転させます。
制御ボードからD6060EへはTTL信号レベルのCW・CCW方向の回転・停止信号、速度変化のためのDC 0[V] 〜 3.2[V] のアナログ信号を入力します。
モータのエンコーダ信号を外部の制御ボードで利用し、モータの速度制御・位置制御が可能です。
新生工業のその他のモデル